#RC台場
#東京台場機器人社團 #RobotClubOdaiba
本ロボットクラブの授業内容は、小学校3年生、4年生、5年生、6年生の学習に適しています。このコースは、アメリカのスタンフォード大学のジョン・J・クレイグ(John J. Craig)教授による『Introduction to Robotics: Mechanics and Control, 4/e』(「#ロボット工学入門:メカニクスと制御 第4版」)の構成を参考にしており、#小学生に適した簡単で学びやすいロボット工学の基礎知識を教え、ロボットアームの組み立てと操作を通して、#学習者が理論を実際に体験できるようにしています。
このコースでは、#ロボット工学 の理論的知識を解説し、主な内容には #空間位置の記述と変換、マニピュレータの #順運動学と逆運動学、マニピュレータのヤコビ行列(#速度と静力)、#マニピュレータの動力学、#軌道計画、マニピュレータの機構設計、マニピュレータの線形および非線形制御、マニピュレータの力制御、ロボットプログラミング言語、プログラム開発環境、オフラインプログラミングが含まれます。
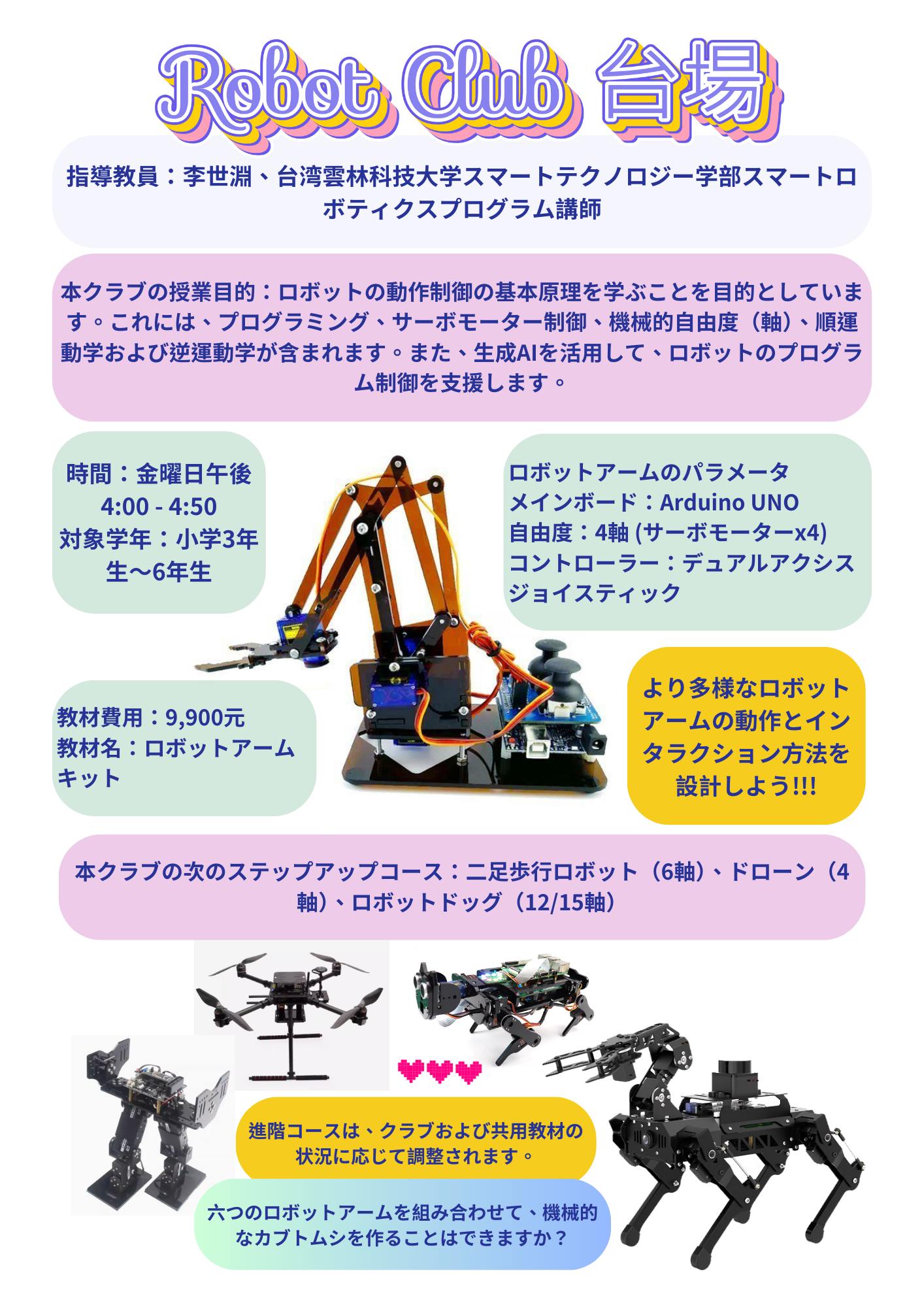
このコースに必要なロボットアーム教材の費用は9,900円(税抜)です。ロボットアーム教材には、Arduino UNO基板、4つのサーボモーター、デュアルアクシスジョイスティック、およびロボットアームの部品が含まれています。
本クラブの講師は、台湾の国立雲林科技大学(YunTech University)スマートテクノロジーカレッジのスマートロボティクスプログラムの李世淵(Lee Shih-Yuan)講師であり、彼のロボット工学の専門知識は、中正大学の電気工学科での羅仁権(Ren C. Luo)教授(元校長)およびロボット研究室で培われたもので、関連するロボットクラブで特に有名なのは、テスラロボティクスアカデミーなどです。
目錄
- イントロダクション (序論)
- 空間変換
- 順運動学
- 逆運動学
- 速度、静力、ヤコビアン
- ダイナミクス (動力学)
- 軌道計画
- ロボットの機械設計 (機械人の機械設計)
- 線形制御
- 非線形制御
- 力制御
- プログラミング言語とシステム (編程言語と系統)
- シミュレーションとオフラインプログラミング (模擬と非直結編程)
Blog comments