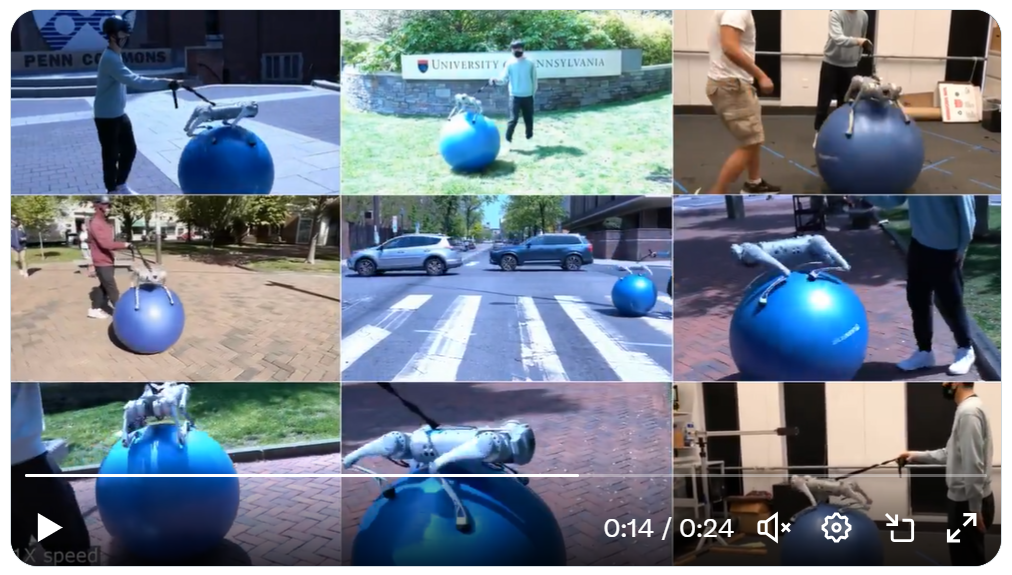
在模擬環境中訓練了一隻機器狗,使其能夠在瑜伽球上保持平衡並行走,然後直接將其技能零次學習地轉移到現實世界中,無需進一步的微調。一次成功。太強了!👍
賓夕法尼亞大學與德克薩斯大學奧斯汀分校團隊利用 NVIDIA 的 Eureka 人工智慧演算法庫訓練出能夠讓機器狗在瑜珈球上保持平衡並行走的開源算法「DrEureka」, DrEureka 能夠讓機器狗適應平坦的道路或草地等各種真實世界的地形。
以下是作者原文翻譯:
我很高興宣佈 DrEureka,一種 LLM 代理,它編寫程式碼以訓練機器人在類比中技能,並編寫更多程式碼來彌合困難的類比現實差距。它完全自動化了從新技能學習到實際部署的通道。
瑜伽球任務特別困難,因為無法準確類比彈力球表面。然而,DrEureka 可以輕鬆搜尋大量的類比到實際設定,並使機器狗能夠在各種地形上操縱球,甚至可以側身行走!
傳統上,類比到實際的轉移是透過域隨機化實現的,這是一個繁瑣的過程,需要專家人類機器人專家盯著每個引數並用手調整。像 GPT-4 這樣的 Frontier LLM 內建了大量的摩擦、阻尼、剛度、重力等物理直覺。我們(略微)驚訝地發現 DrEureka 能夠勝任地調整這些引數並很好地解釋其推理。
DrEureka 建立在我們之前的工作 Eureka 之上,Eureka 是一種演算法,教導五指機器人手進行旋筆。它在我們透過 AI 代理系統自動化整個機器人學習通道的任務上更進一步。一個輸出字串的模型將監督另一個輸出扭矩控制的模型。
我們開源了所有內容!歡迎大家今天檢視論文、更多影片,並試用程式碼庫!
對賓夕法尼亞大學、 NVIDIA 與德克薩斯大學奧斯汀分校團隊提出的新型開源算法「DrEureka」感興趣的朋友可以觀看下方影片或者前往團隊提供的 GitHub :
https://youtu.be/kRj3crlFdOU?si=osJxQ61PhbIA1ZYq
https://youtu.be/eECuJUuSt5c?si=wi0HLxiKLseS2sj6
論文:
https://eureka-research.github.io/dr-eureka/
程式碼:
https://github.com/eureka-research/DrEureka
參考文章 https://today.line.me/tw/v2/article/x2wjePw
Blog comments